| | |
Computer Organization and Architecture
Logic Gates
Circuits to Truth Tables
Circuits to Expressions
Expressions to Circuits
Finding SOP from K-Map
Finding POS from K-Map
Finding SOP from K-Map having Don't Care
Half Adders
Full Adders
Flip Flop
Integrated Circuits
Decoders
Multiplexers
Registers
Counters
RAM
ROM
Number Systems
Complements
Number Representations
Binary Addition and Subtraction
Gray Codes
Error Detection Codes
Register Transfer Language
Bus and Memory Transfers
Arithmetic Micro-operations
Logical Micro-operations
Shift Micro-operations
Basic Computer Organization
Timing and Control
Instruction Cycle
Instruction Types
Interrupt Cycle
Complete Computer Description
General Register Organization
Stack Organization
Evaluation of Arithmetic Operations
Address Modes
Instruction Formats
RISC and CISC Architectures
Parallel Processing
Multiplication Algorithms
Logic Gates
Circuits to Truth Tables
Circuits to Expressions
Expressions to Circuits
Finding SOP from K-Map
Finding POS from K-Map
Finding SOP from K-Map having Don't Care
Half Adders
Full Adders
Flip Flop
Integrated Circuits
Decoders
Multiplexers
Registers
Counters
RAM
ROM
Number Systems
Complements
Number Representations
Binary Addition and Subtraction
Gray Codes
Error Detection Codes
Register Transfer Language
Bus and Memory Transfers
Arithmetic Micro-operations
Logical Micro-operations
Shift Micro-operations
Basic Computer Organization
Timing and Control
Instruction Cycle
Instruction Types
Interrupt Cycle
Complete Computer Description
General Register Organization
Stack Organization
Evaluation of Arithmetic Operations
Address Modes
Instruction Formats
RISC and CISC Architectures
Parallel Processing
Multiplication Algorithms
Handling of Don't Care conditions (in SOP)
Rules for handling Don't Care conditions in simplification process:
- Prepare the respective map depending upon the number of variables used in the function.
- Put 1 on appropriate places for every min-term provided in the function.
- Put a CROSS ( X ) on every min-term showing Don't Care condition.
- Make pairs of 1's in the map. Consider the CROSSes also like a 1 in the map, since we Don't know whether that min-term is a 0 or a 1.
- If any Don't Care min-term is left unpaired, leave it. No any evaluation is required for this unpaired min-term, as it is a Don't Care condition.
- At last, deduce the expression simply like a normal K-map.
Notes:
- Don't Care condition is a significant issue in understanding and simplifying Boolean expressions. Since its name is pretty much descriptive, a Don't Care condition simply means that the machine is not sure about its output. On the same min-term, it can be 0 or 1.
- These conditions are marked as a cross ( X ) in the K-map, and are evaluated simply as other min-terms.
- Don't Care terms are feasible for evaluation but only as far as they contribute in making larger groups thereby improving the simplification.
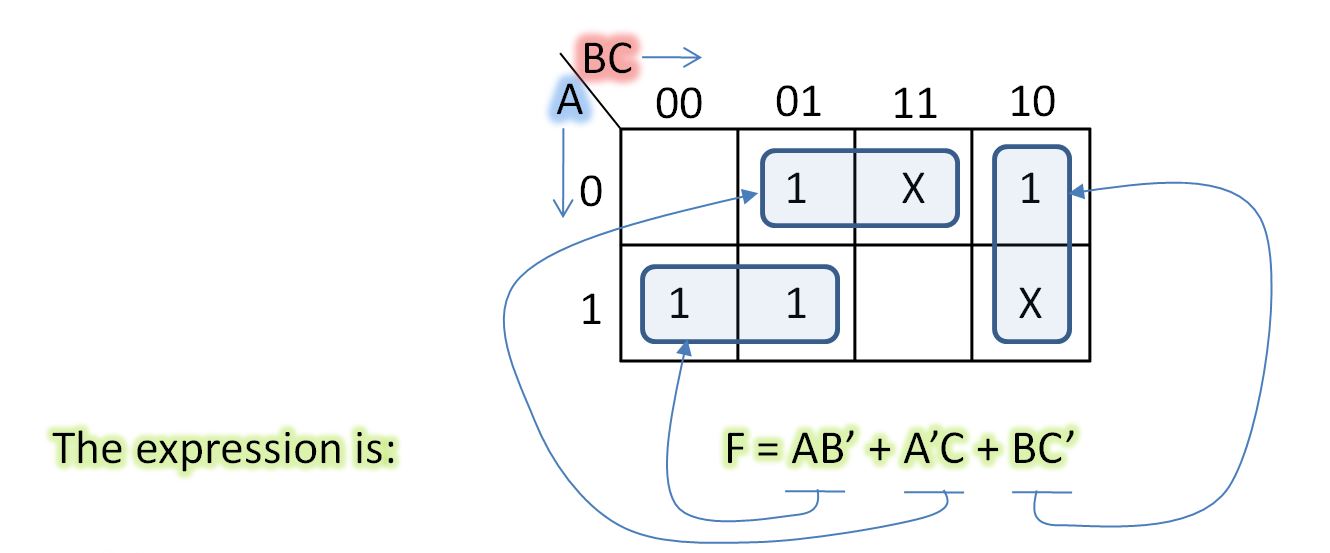
Ex. Simplify the following function in SOP form using K-map method.
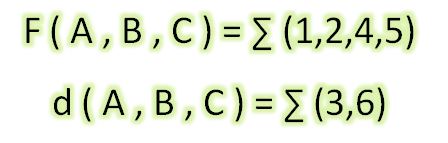
Solution.